Motor ventilov: princíp činnosti a obvodu
S cieľom vyriešiť kontrolné úlohymoderné presné systémy, je stále viac používaný ventilový motor. To sa vyznačuje veľkou výhodou takýchto zariadení, ako aj aktívnou tvorbou výpočtových schopností mikroelektroniky. Ako viete, môžu poskytnúť vysokú hustotu dlhodobého krútiaceho momentu a energetickú účinnosť v porovnaní s inými typmi motorov.
Schéma ventilového motora

Motor pozostáva z nasledujúcich častí:
1. Zadná časť puzdra.
2. Stator.
3. Ložisko.
4. Magnetický disk (rotor).
5. Ložisko.
6. Stator s navíjaním.
7. Predná časť tela.
Motor ventilu má vzťah medziviacfázové vinutie statora a rotora. Majú permanentné magnety a integrovaný snímač polohy. Spínanie prístroja sa realizuje pomocou meniča ventilu, v dôsledku čoho bol prijatý takýto názov.
Schéma motora ventilátora pozostáva zo zadnej častiObal a senzor PCB, ložiskové objímka hriadeľa a magnety rotora ložiská izolačné krúžok špirálová pružina trelchatoy vložená objímka Hallov snímač, izolácia, kryty a vodičov.
Ak sú vinutia spojené s "hviezdou", zariadeniemá veľké konštantné momenty, takže táto zostava slúži na ovládanie osí. V prípade upevnenia vinutia s "trojuholníkom" môžu byť použité pre prácu pri vysokých rýchlostiach. Najčastejšie je počet dvojíc pólov vypočítaný počtom rotorových magnetov, ktoré pomáhajú určiť pomer elektrických a mechanických rýchlostí.
Stator môže byť vyrobený z neželezného aleboželezné jadro. Použitie takých stavieb ako v prvom prevedení, je možné zaistiť neprítomnosť príťažlivosťou magnetov rotora, ale v tomto okamihu, zníži o 20% účinnosti motora z dôvodu zníženého konštantnú hodnotu momentu.
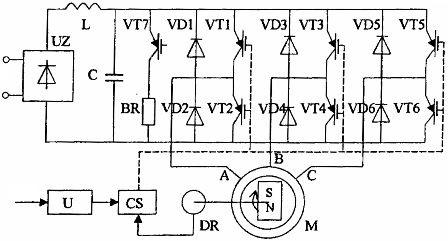
Z obvodu je zrejmé, že v statore je prúd vytvorený vo vinutí a v rotoru je vytvorený pomocou vysokoenergetických permanentných magnetov.
Legenda:
- VT1-VT7 - tranzistorové komunikátory;
- A, B, C - fázy vinutí;
- M - moment motora;
- DR - snímač polohy rotora;
- U - regulátor napájacieho napätia motora;
- S (juh), N (sever) - smer magnetu;
- UZ - frekvenčný menič;
- BR - snímač rýchlosti;
- VD - zenerova dióda;
- L - cievka indukčnosti.
Schéma motora ukazuje, že jeden z hlavnýchvýhody rotora, v ktorom sú inštalované permanentné magnety, je zmenšenie jeho priemeru a v dôsledku toho zníženie momentu zotrvačnosti. Takéto zariadenia môžu byť zabudované do samotného zariadenia alebo umiestnené na jeho povrchu. Zníženie tohto ukazovateľa veľmi často vedie k malým hodnotám rovnováhy momentu zotrvačnosti samotného motora a zaťaženia pôsobiaceho na jeho hriadeľ, čo komplikuje činnosť pohonu. Z tohto dôvodu môžu výrobcovia ponúknuť štandardné a zvýšené 2-4-násobok momentu zotrvačnosti.
Princípy práce
Dnes sa stáva veľmi populárnymMotor ventilu, ktorého princíp fungovania je založený na skutočnosti, že riadiaca jednotka spúšťa spínanie vinutia statora. V dôsledku toho vektor vektoru magnetického poľa zostáva vždy posunutý o uhol blížiaci sa 900 (-900) vzhľadom na rotor. Regulátor je určený na riadenie prúdu, ktorý sa pohybuje vinutiami motora, vrátane veľkosti magnetického poľa statora. V dôsledku toho je možné nastaviť krútiaci moment pôsobiaci na zariadenie. Indikátor uhla medzi vektormi môže určiť smer otáčania, ktorý na ňom pôsobí.
Malo by sa vziať do úvahy, že hovoríme o elektrických zariadeniachstupňov (sú oveľa menšie ako geometrické). Napríklad, dajte výpočet ventilového motora s rotorom, ktorý má sám o sebe 3 páry pólov. Potom je jeho optimálny uhol 900/3 = 300. Tieto páry 6 poskytujú fázy komutáciu vinutie, potom je to, že stator sa môže pohybovať vektor hopping 600. Z toho je zrejmé, že tento uhol medzi vektormi sa budú nutne meniť v rozmedzí od 600 do 1200, od otáčania rotora.
Motor ventilu, ktorého princíp fungovaniazaložené na prepínanie na reverznej fáze, ktoré, pretože budiace tok sa udržiava relatívne konštantné pohyb kotvy, po ich interakcie začne generovať rotačný moment. To má tendenciu otáčať rotor takým spôsobom, že všetky nite a kotva splývajú dohromady. Ale aj keď sa obracia čidlo začne prepnutie cievky a prietok sa presunie na ďalší krok. V tomto bode, bude výsledný vektor posunu, ale zostávajú úplne nehybne vzhľadom k toku rotora, čo v konečnom dôsledku vytvára krútiaci moment hriadeľa.
výhody
Pomocou ventilu motora v prevádzke je možné poznamenať jeho výhody:
- možnosť použitia širokého rozsahu na úpravu rýchlosti otáčania;
- vysoká dynamika a rýchlosť;
- maximálna presnosť polohovania;
- nízke náklady na údržbu;
- prístroj možno pripísať objektom odolným voči výbuchu;
- má schopnosť niesť veľké preťaženie v momente otáčania;
- vysokú účinnosť, ktorá je vyššia ako 90%;
- sú kĺzavé elektronické kontakty, ktoré výrazne zvyšujú životnosť a životnosť;
- pri dlhšom prevádzke nie je prehriatie motora.
nedostatky
Napriek obrovskému množstvu výhod má ventilový motor aj v prevádzke nevýhody:
- pomerne komplikované ovládanie elektromotora;
- relatívne vysokú cenu zariadenia v dôsledku použitia rotora, ktorý má drahé permanentné magnety.
Motor s indukčným ventilom

Motor induktora ventilu je zariadenie,v ktorom je poskytnutý spínací magnetický odpor. Premeny energie v nej dochádza v dôsledku zmien v indukčnosti vinutia, ktoré sú umiestnené na statora zubov expresné zariadení pri pohybe magnetického rotora. Uvádzacia zariadenie dostane elektrický prevodník, striedavo prepínanie vinutie motora závažnosti pohybu rotora.
Motor induktora ventilu predstavujekomplexný komplexný systém, v ktorom spolupracujú zložky, ktoré sú rôznorodé vo svojej fyzickej povahe. Pre úspešnú konštrukciu takýchto zariadení je potrebná hĺbková znalosť v oblasti navrhovania strojov a mechaniky, ako aj elektronika, elektromechanika a mikroprocesorová technológia.
Moderné zariadenie funguje akoelektrický motor pracujúci spoločne s elektronickým konvertorom, ktorý sa vyrába integrovanou technológiou pomocou mikroprocesora. Umožňuje implementovať kvalitné riadenie motora s najlepšími konverznými pomermi energie.
Vlastnosti motora

Takéto zariadenia majú vysokú dynamiku,veľká preťažiteľnosť a presné polohovanie. Vzhľadom na to, že nemajú pohyblivé časti, ich použitie je možné v explozívnom a agresívnom prostredí. Takéto motory sa tiež nazývajú kolektorom, ich hlavnou výhodou v porovnaní s kolektorom je rýchlosť, ktorá závisí od zaťažovacieho napätia krútiaceho momentu záťaže. Ďalšou dôležitou vlastnosťou je neprítomnosť obrusovateľných a trecích prvkov, ktoré prepínajú kontakty, kvôli čomu rastie zdroj použitia zariadenia.
Prúdové motory s jednosmerným prúdom
Všetky DC motory je možné zavolaťstriedavý. Pracujú zo siete s jednosmerným prúdom. Zostava kefy je určená na elektrické spojenie obvodov rotora a statora. Tento detail je najzraniteľnejší a dostatočne náročný na údržbu a opravu.
Motor DC DC pracujerovnaký princíp ako všetky synchronné zariadenia tohto typu. Je to uzavretý systém, vrátane výkonového polovodičového meniča, snímača polohy rotora a koordinátora.
Striedavé šesťhranné ventily
Takéto zariadenia získavajú svoju vlastnú silu zo sietístriedavý prúd. Rýchlosť otáčania rotora a pohyb prvej harmonickej statorovej magnetickej sily sa úplne zhodujú. Tento podtyp motora sa môže používať s vysokým výkonom. Táto skupina zahŕňa stupňovité a reaktívne ventilové zariadenia. Charakteristickým rysom krokových zariadení je diskrétne uhlovo posunutý rotor počas jeho prevádzky. Napájanie vinutia je tvorené polovodičovými komponentmi. Ovládanie motora ventilátora sa uskutočňuje s následným posunutím rotora, čo vytvára prepínanie jeho výkonu z jedného navíjania na druhý. Toto zariadenie sa dá rozdeliť na jedno-, troj- a viacfázové, z ktorých prvý môže obsahovať spúšťací obvod alebo fázovo posunutý obvod a tiež sa môže spustiť manuálne.
Princíp činnosti synchrónneho motora

Synchrónny motor brány pracujeInterakcia magnetických polí rotora a statora. Schématicky, magnetické pole počas otáčania môže byť reprezentované preplnením rovnakých magnetov, ktoré sa pohybujú rýchlosťou statorového magnetického poľa. Políčko rotora môže byť tiež zobrazené ako permanentný magnet, ktorý robí synchronizáciu so statorovým poľom. Pri absencii vonkajšieho krútiaceho momentu, ktorý sa aplikuje na hriadeľ zariadenia, sa osi úplne zhodujú. Účinné sily priťahovania prechádzajú pozdĺž celej osi pólov a môžu sa navzájom kompenzovať. Uhol medzi nimi sa rovná nule.
V prípade, že dôjde k ovplyvneniu hriadeľa strojabrzdný moment, rotor sa posunie na stranu s oneskorením. Z tohto dôvodu sú sily priťahovania rozdelené na komponenty, ktoré sú smerované pozdĺž osi indikátorov plus a kolmo na os pólov. Pri použití vonkajšieho krútiaceho momentu, ktorý vytvára zrýchlenie, to znamená, že začne pôsobiť v smere otáčania hriadeľa, obraz interakcie polí sa úplne zmení. Smer uhlového posuvu sa začína pretvárať na opačnú stranu a v tomto smere smer tangenciálnych síl a účinok zmeny elektromagnetického momentu. V tomto scenári sa motor stáva brzdením a zariadenie funguje ako generátor, ktorý premieňa mechanickú energiu dodávanú na hriadeľ na elektrickú energiu. Potom sa presmeruje na sieť, ktorá napája stator.
Ak neexistuje žiadna externá,moment začne zaujímať polohu, v ktorej sa os pólov statorového magnetického poľa zhoduje s pozdĺžnou osou. Toto umiestnenie zodpovedá minimálnemu odporu prietoku v statoru.
V prípade nárazu na hriadeľ brzdyrotor sa vychýli a statorové magnetické pole sa deformuje, pretože prietok má tendenciu zatvárať pri najnižšom odporu. Aby sme to určili, potrebujeme silové čiary, ktorých smer v každom z bodov bude zodpovedať pohybu pôsobenia sily, takže zmena poľa povedie k vzhľadu tangenciálnej interakcie.
Po zvážení všetkých týchto procesov v synchrónnommotory, je možné odhaliť demonštratívny princíp reverzibility rôznych strojov, to je možnosť akéhokoľvek elektrického prístroja zmeniť smer premenenej energie naopak.
Bezkartáčový motor s permanentnými magnetmi

Motor na trvalé magnetické ventily sa používa na riešenie vážnych obranných a priemyselných úloh, pretože takéto zariadenie má veľký výkon a účinnosť.
Tieto zariadenia sa najčastejšie používajú v priemysle,kde je potrebná relatívne nízka spotreba energie a malé rozmery. Môžu mať širokú škálu rozmerov bez technologických obmedzení. Zároveň veľké zariadenia nie sú úplne nové, sú najčastejšie vyrábané spoločnosťami, ktoré sa snažia prekonať ekonomické ťažkosti, ktoré obmedzujú rozsah týchto zariadení. Majú svoje výhody, medzi ktoré patrí vysoká účinnosť v dôsledku strát v rotoru a vyššia hustota výkonu. Ak chcete ovládať bezkartáčové motory, potrebujete frekvenčný menič.
Z analýzy nákladov a výsledkov vyplýva, žezariadenia s permanentnými magnetmi sú v porovnaní s inými alternatívnymi technológiami oveľa lepšie. Najčastejšie sa používajú v odvetviach s pomerne ťažkým pracovným plánom lodných motorov, vo vojenskom a obranného priemysle a v iných divíziách, ktorých počet sa neustále zvyšuje.
Tryskový motor

Vetraný prúdový motor pracuje spomocou dvojfázových vinutí, ktoré sú inštalované okolo diametrálne opačných pólov statora. Napájací zdroj sa premiestňuje do rotora v súlade s pólmi. Jeho opozícia je teda úplne obmedzená na minimum.
Samotný ventilový motor,poskytuje vysoko účinnú rýchlosť pohonu s optimalizovaným magnetizmom pre prácu s opačným smerom. Informácie o umiestnení rotora sa používajú na riadenie fáz napájacieho napätia, pretože je to optimálne na dosiahnutie plynulého a plynulého krútiaceho momentu a vysokej účinnosti.
Signály, ktoré vydávajú prúdové motory, sú umiestnené na uhlovej nenasýtenej fáze indukčnosti. Minimálny odpor pólu úplne zodpovedá maximálnej indukčnosti zariadenia.
Pozitívny moment možno dosiahnuť len vtedy, akrohy, keď sú ukazovatele pozitívne. Pri nízkych otáčkach musí byť fázový prúd nevyhnutne obmedzený, aby sa chránila elektronika pred vysokými sekundami.
Transformačný mechanizmus môže byť ilustrovanýlínia reaktívnej energie. Výkonná sféra sa vyznačuje jedlom, ktoré sa transformuje na mechanickú energiu. V prípade jeho náhleho odpojenia sa nadmerná alebo zostatková sila vracia do statora. Minimálne ukazovatele účinku magnetického poľa na výkon zariadenia sú jeho hlavný rozdiel od podobných zariadení.